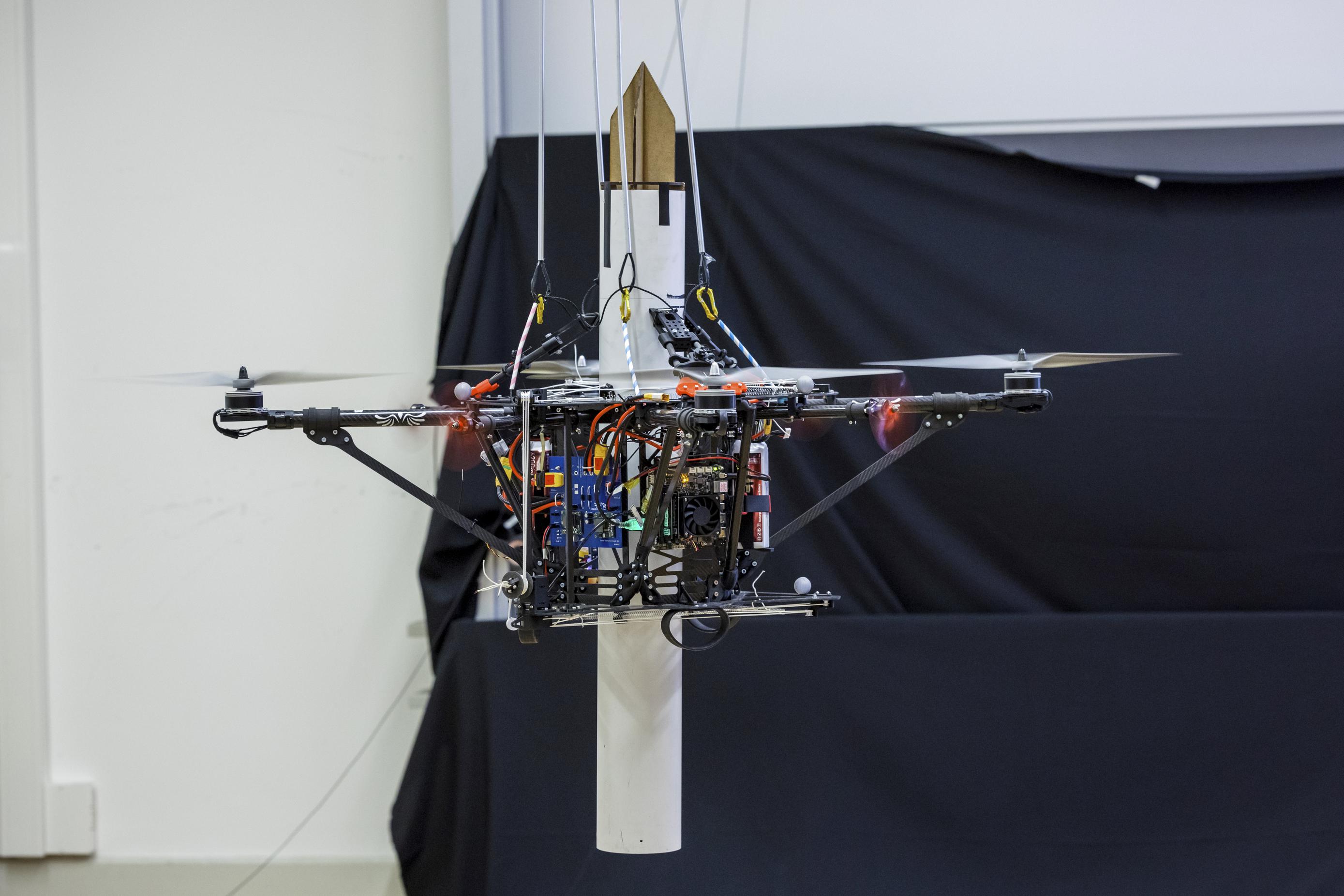
In challenging terrains, constructing structures, such as antennas and cable car masts, often requires the use of helicopters to transport loads via ropes. The swinging of the loads, exacerbated by wind, impairs positioning accuracy, therefore necessitating precise manual placement by ground crews. This increases costs and the risk of injuries. Challenging this paradigm, we present Geranos, a specialized multirotor unmanned aerial vehicle (UAV) designed to enhance aerial transportation and assembly. Geranos demonstrates exceptional prowess in accurately positioning vertical poles, achieving this through an innovative integration of load transport and precision. Its unique ring design mitigates the impact of high pole inertia, while a lightweight two-part grasping mechanism ensures secure load attachment without active force. With four primary propellers countering gravity and four auxiliary ones enhancing lateral precision, Geranos achieves comprehensive position and attitude control around hovering. Our experimental demonstration mimicking antenna/cable car mast installations showcases Geranos' ability in stacking poles (3 kg, 2 m long) with remarkable sub-5-cm placement accuracy without the need of human manual intervention.
If you find this useful for your research, please consider citing our paper:
@article{geranos2024,
title={Geranos: A novel tilted-rotors aerial robot for the transportation of poles},
author={Bamert, Samuel and Cathomen, Rafael and Gorlo, Nicolas and K{\"a}ppeli, Gabriel and M{\"u}ller, Mario Sven and Reinhart, Tim and Stadler, Henriette and Shen, Hua and Cuniato, Eugenio and Tognon, Marco and others},
journal={IEEE Robotics \& Automation Magazine},
volume={31},
number={2},
pages={66--77},
year={2024},
publisher={IEEE}
}